
隨著科學技術水平的提高和世界經濟的快速發展,工程機器人越來越廣泛地被應用到許多行業當中,尤其是在高危、惡劣環境以及枯燥、繁重的作業領域,對工程機器人的需求更加迫切。因而,工程機器人的開發與應用,引起了世界各國的高度重視,產品發展前景十分廣闊。
1 工程機器人的定義與分類
工程機器人是一種面向高危及特殊環境下依靠自身動力和控制能力來進行工程施工作業的遙操作多關節機械手或多自由度機器人。它既具有工程機械的大功率、多功能、適用范圍廣的優點,又具有機器人的靈活移動、環境感知、智能識別等各種功能。
工程機器人是機器人家族中的新成員。與工業機器人在固定環境下依據事先編制的程序運行不同,工程機器人主要在非結構環境下工作,靠接受人類指揮,或依據以人工智能技術制定的原則綱領行動。因此工程機器人更強調感知、思維和復雜行動的能力,比一般意義上的工業機器人需要更大的靈活性、機動性,具有更強的感知能力、決策能力、反應能力以及行動能力。工程機器人從外觀上也遠遠脫離了最初工業機器人所具有的形狀。工程機器人融合了更多學科的知識,如機構學、控制工程、計算機科學、人工智能、微電子學、光學、傳感技術、材料科學、仿生學等。
工程機器人根據應用領域可以分為:農林業工程機器人、工業工程機器人、建筑工程機器人、礦業工程機器人、核工業工程機器人、搶險救援工程機器人、軍事工程機器人等;按作業方式可以分為:破拆機器人、搬運機器人、抓取裝卸機器人、探測機器人等。
2 工程機器人的基本結構與工作特性
工程機器人的基本特征是液壓驅動、遙操作、移動作業,具有大功率作業、寬范圍作業、多功能作業和智能作業的特點。
工程機器人的基本構成包括:控制系統、驅動裝置、執行機構和感知系統組成,如圖1所示。
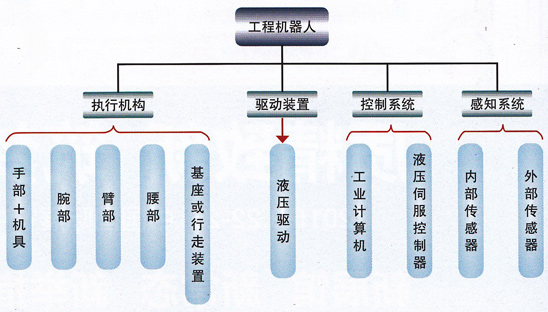
圖(1)
級調速和力控制,防過載性能好。由于液壓驅動可以實現直接驅動,省去工業機器人的減速機加伺服電機的傳動機構,使得驅動系統簡單,結構緊湊。隨著液壓伺服控制技術不斷提高以及數值液壓技術的發展,液壓驅動將更能代表機器人的節能化、輕量化、緊湊化和智能化的發展方向。
執行系統:與工業機器人相比,工程機器人執行系統主要增加了行走系統。尤其是在不同環境下使用,要求工程機器人具備全地形行走功能。圖2所示vcb為一種典型工程機器人——破拆機器人的執行機構。

圖(2)
這種典型的執行機構由手部、腕部、小臂(上臂)、大臂(下臂)、腰部、足部等組成。其中手部為末端執行器,如夾持工具之類的屬具。可以更換不同的屬具,如液壓剪、液壓錘、液壓抓斗等,以實現不同的作業能力。腕部通常具有3自由度,實現手部動作,是執行機構最復雜的部分。臂部用于連接腰部和腕部,帶動腕部做平面運動。腰部用來連接臂部與基座,做回轉運動,是執行機構的關鍵部件。足部包括行走系統和作業時用于支撐機體的支腿。
控制系統:工程機器人的控制系統一般比較復雜,涉及到行走、避障、有效作業等方面,要求控制系統具有較強的推理和思維能力,實時響應能力強,適應非結構性環境能力強。控制系統是機器人系統功能實現的核心,如果把機器人機械結構比作人的骨豁和肌肉的話,機器人控制系統就相當于人的神經系統。機器人要實現自身的運動、對環境的感知以及與外界的交互等功能,都需要控制系統對各機械部件以及傳感器單元進行協調和控制。
感知系統:工程機器人的感知能力是未來工程機器人智能化的研究重點之一。機器人傳感器在機器人的控制中起了非常重要的作用,機器人傳感器分為內部傳感器和外部傳感器2大類。內部傳感器主要有位置傳感器、速度傳感器、力傳感器、溫度傳感器、平衡傳感器。內部傳感器用測量到的角度、角速度、力等檢測機器人的內部狀態,了解機器人各執行機構的位置和姿態、運動速度等,以調整和控制機器人的自身行動。外部傳感器主要有視覺傳感器、觸覺傳感器、聽覺傳感器、冷覺傳感器、病覺(異常)傳感器、味覺傳感器、嗅覺傳感器等。外部傳感器用來檢測機器人所處環境、外部物體的狀態或機器人與外部物體的關系。
工程機器人研究的現狀表明,由于受到機構、控制、傳感器以及人工智能水平的限制,研究出能在未知環境中全自主方式工作的機器人是目前難以實現的目標。因此,目前在核工業、搶險救災等高危、惡劣的環境中被廣泛應用的是遙操作機器人。遙操作機器人主要分為視覺臨場感遙操作機器人、力覺臨場感遙操作機器人、觸覺臨場感遙操作機器人及運動覺臨場感遙操作機器人等。基于臨場感的遙操作機器人系統原理如圖3所示,它由操作者、主機器人(手控器)、通訊環節、從機器人和作業環境5部分構成。在臨場感系統工作過程中,由操作者向主機器人發出操作命令(如位置指令)操作主機器人運動,主機器人的運動信息通過通訊環節傳給遠方的從機器人,從而控制從機器人的運動;當從機器人同環境交互時,從機器人的運動信息(如視覺、力覺、觸覺等信息)又通過通訊環節反饋給本地主機器人,使操作者對于現場作業情況有了有效的感知,從而能夠及時做出準確判斷,發出相應的操作命令,控制遠方從機器人準確、高效地完成作業任務。目前,基于視覺臨場感的工程機器人遙操作控制主要是用攝像機獲取現場的視頻圖像并回傳到主控端,操縱者通過監視器來完成對工程機器人的操作任務。

圖(3)
其中,通訊環節作為臨場感系統的數據交換和連接環節,是控制量信息、傳感器信息及視頻、圖像信息的傳輸通道,是臨場感系統進行可靠工作的基本保障。
3 工程機器人國內外發展概況
在國外,早在20世紀70年代歐美、日本等國家就開始在工程機械基礎上研制開發各類工程施工自動作業機械,并形成兩大發展方向,一是工程機械智能化,一是專門發展起來的工程機器人分支。針對高危、惡劣環境的施工作業,歐美、日韓等國家都已經全部采用工程機器人或機械手,技術水平先進。
其中,破拆機器人是在工程施工中應用最廣泛的工程機器人之一,由于采用無線遙控作業方式,破拆機器人可以應用在冶金、礦山、建筑、交通以及搶險救援等眾多領域。瑞士布魯克公司是目前居于世界領先地位的破拆機器人專門生產廠商,公司自20世紀70年代就開發、研制、生產遙控電液式多功能破拆機器人,經過不斷的改進與發展,積累了豐富的經驗,無論是設計、選材還是制造水平都處于國際領先地位,是目前拆除機器人最大的供應商,產品銷往世界各地。另外,日本、德國等發達國家在破拆機器人領域也都走在了世界前列。像德國TOPTEC公司生產的TOPTEC1850E、TOPTEC2500E工程機器人,日本TmsukT52型和T53型雙機械臂機器人等,技術水平先進。破拆機器人的末端執行器通常為液壓錘、液壓剪等,以實現破碎、拆除作業。將末端執行器更換成液壓抓手等其他專用屬具,再將主體結構和控制系統根據作業環境作適當的改變,則可演變成其他類型的機器人,像搬運機器人、抓取裝卸機器人等。
在搶險救援領域,20世紀80年代就已經有人對將機器人應用于救援工作中進行探討,但救援機器人技術的正式研究始于1995年的日本神戶-大阪大地震,并于2001年的美國9·11事件中,救援機器人正式投入使用。日本作為一個多地震災害的國家,十分重視救援機器人的研制,其技術水平一直處于世界領先地位。美國在9·11事件后,對救援機器人的研究更加重視。其中,極具代表意義的由Irobot公司研制的小型便攜帶式機器人Packbot系列和“Warrior(6戰士)”等,均得到了較好的應用。其他國家也很重視救援機器人的研究。如加拿大Inuktun公司研制的MicroVGTV及Sherbrook大學研制的AZIMUT機器人、西班牙的ALACRANE、瑞士的Shrimp、英國的“手推車”(Weelbarrow)Mk7型排爆機器人、德國TEODORG公司的MV4機器人、法國的MK4D智能排爆機器人等。
在農林業方面,進入后工業化的發達國家,隨著農林業生產的日趨工業化、規模化及精準化的不斷發展,農林業機器人研發早已成為其科研的重點內容之一,在伐木、育苗、移苗、嫁接、農產品收獲等方面得到諸多試驗與應用,相繼研制出了伐木機器人、嫁接機器人、扦插機器人、移栽機器人和采摘機器人等多種產品。
而在國內,工程機器人的研制開發才剛剛起步,工程機械主機廠和部分科研院所開始加大對智能型工程機械的研發投入,但專業從事工程機器人研發制造的企業和研究機構很少。應用方面也僅限于一些常規的工業應用,而且產品幾乎全為進口。
驚天智能裝備股份有限公司自2005年自主立項,開始研制破拆機器人,目前已研制出多款工程機器人產品,并且已經進入產業化和應用推廣階段。
在搶險救援領域,國內的救災機器人的研究起步較晚,但受到的重視程度很高。如國家“863”計劃支持研發地震救援輔助機器人等的一系列措施,國內各大高校、研究機構以及企業單位等都進行了積極研究,近年來取得了很大進展。國家“十二五”科技支撐計劃的重點項目“龍蝦”救援機器人是目前世界上最大的搶險救援機器。
4 工程機器人的應用
工程機器人主要應用于各種高危和特殊環境施工領域,如高溫高壓、易燃易爆易坍塌、有毒有害氣體、核輻射、危險品搬運以及軍事應用,因此,在金屬渣錠破碎、建筑拆除、隧道施工、井下作業、搶險救援,以及農林業、核工業等都得到了廣泛的應用。
4.1工業破碎作業
在鋼鐵冶煉廠,工程機器人主要用途包括:主溝及渣溝破碎、開鐵口、爐口除渣、拆爐拆包、魚雷罐熱態耐材、混鐵車解體等。在有色行業用來進行余熱鍋爐清灰、陽極爐清理、金屬錠破碎、煙道和溜槽的清理等。在鋁行業用來清鋁包、清理陽極、在線刨槽、刨保溫爐和集中槽大修等。
在水泥廠,破拆機器人是水泥回轉窯維修的新一代拆磚設備,遙控作業,用以代替人工和小挖維修回轉窯,大大縮短停窯時間,給企業帶來巨大的經濟效益。
4.2搶險救援應用
災害現場的搶險救援工作,是機器人開發領域的一大難題。不同環境條件下,機器人的解決方案大不相同。目前,多功能作業機器人,已廣泛應用于消防破拆救援、災后搶修搶建、地震后救援、反恐排爆、核事故應急救援等。
4.3建筑應用
隨著經濟的高速發展,建筑施工要求越來越高,建筑樓宇的改造工作越來越多,但勞動力成本卻逐年攀升。使用工程機器人進行作業,不但安全可靠,而且縮短工期,減少人力需求。相較于傳統的混凝土切割鋸、風鎬和挖掘機等拆除設備,使用破拆機器人使施工能在無振動、低噪音、無廢氣、無揚塵等情況下進行,對周圍環境影響降到最小,而且降低施工成本,大大提高工作效率。為避免局部破拆對整個基礎的影響,近年來水力破拆機器人亦日益受到業界的高度重視。
4.4隧道應用
工程機器人在隧道施工方面有廣泛的應用,是開鑿聯絡通道、安全硐室、隧道維修改造的理想設備。常用于地鐵隧道臨時墻的拆除、隧道的開拓、巷道的支護、排水和電纜隧道的開挖,在空間狹小和鉆爆法施工工藝不能使用的場所具有巨大優勢。
通常工程機器人車小力大,機動靈活,可以進入大型設備不能到達的狹窄的工作面和危險場所作業,提高工作效率,降低生產成本。可以帶挖斗、分裂機、液壓錘、液壓鉆等作業,在隧道施工中,發揮“一機多能”的優勢。
4.5礦山應用
工程機器人在地下礦山有廣泛的應用,可用來進行巷道支護、撬毛、二次破碎、鉆錨固孔和爆破孔等作業。很多有色金屬礦山和黃金礦山可以用工程機器人進行破大塊、剪錨索、挖水溝、修理斜坡道和整修變形的巷道等作業。同時,機器人可用做溜井格篩旁邊的固定破碎站,也可作為窄礦脈的礦石回采和扒礦。機器人采用無線遙控操作,地下礦山作業時,操作人員可以選擇安全、視線好的位置操作機器,避免落石對人員的傷害。
4.6核工業
由于核電站設備結構復雜,設備本身或其運行環境具有放射性,同時還兼具水下、高溫、高壓等特點,簡單的機械手往往不能完成相關操作,利用機器人進行設備檢修、乏燃料轉運、放射性廢物處置和核事故應急處理等工作,可以大幅提高核電站的檢修水平或事故處理效率,降低工作人員受照劑量和勞動強度。
5總結與展望
工程機器人最大的特點是工作在非結構環境下,且面臨的工作環境更復雜。從某種意義上講,一個國家工程機器人的技術水平反映了這個國家機器人的技術水平。工程機器人因其先進的性能已被廣泛地應用到核工業、搶險救援、建筑工程、農業、冶金行業等,隨著科技進步和技術積累,工程機器人在未來必將發揮更大的作用。
我國的工程機器人起步較晚,經過幾十年的發展,雖取得了一定的成績,但和國外發達國家相比,差距還很大。毋庸質疑,21世紀機器人技術必將得到更大的發展,成為各國必爭的高科技制高點。我們必須緊跟世界科技發展的潮流,加大對戰略性、基礎性、關鍵性作用的重大課題的投入,不畏艱難、刻苦攻關、提高自主創新的能力。同時,我們也要加強同國際科技界的交流與合作,努力學習和運用世界先進科技成果,為我國機器人事業的發展作出應有貢獻。

